Archivo de la etiqueta: sumitomo
Formacion anormal de humos en vehiculos
Síntoma, diagnóstico de averías
Humo azul
Humo blanco o gris
ILUMINACIÓN FRONTAL INTELIGENTE
 El último hito de los laboratorios de investigación ydesarrollo de Hella se llama VARILIS, el sistema deiluminación inteligente que va a aumentar el confort y laseguridad de la conducción nocturna.VARILIS se ajusta de manera automática a situaciones ycondiciones lumínicas distintas. Tiene en cuenta factorescomo la velocidad, condiciones desfavorables, curvas, así como la conducción por autopistas o carretera. VARILIS aporta más seguridad en la carretera y a su vez descarga al conductor de tareasadicionales. Iluminación frontal inteligente, Iluminación de la calzada adecuada a cualquier situación.Mayor seguridad y comodidad.
El último hito de los laboratorios de investigación ydesarrollo de Hella se llama VARILIS, el sistema deiluminación inteligente que va a aumentar el confort y laseguridad de la conducción nocturna.VARILIS se ajusta de manera automática a situaciones ycondiciones lumínicas distintas. Tiene en cuenta factorescomo la velocidad, condiciones desfavorables, curvas, así como la conducción por autopistas o carretera. VARILIS aporta más seguridad en la carretera y a su vez descarga al conductor de tareasadicionales. Iluminación frontal inteligente, Iluminación de la calzada adecuada a cualquier situación.Mayor seguridad y comodidad.

 DIODOS LEDS
DIODOS LEDS
La tecnología LED (Diodos Emisores de Luz) o también llamada Luz Fría (Cool Light) se presenta como la mayor revolución en iluminación desde que Edison inventase la bombilla eléctrica y ya se habla de que llegarán a reemplazar las bombillas convencionalesutilizadas hasta el momento en los vehículos. Hasta la actualidad la luz de las bombillas se generaba a base de filamentos convencionales en los que el 90% de la energía se transformaba en calor y se perdía.La tecnología LED hace brillar un cristal por lo que la energía se transforma directamente . en luz. De este modo el consumo de estas luces es hasta 20 veces inferio que el de una bombilla equivalente.

VENTAJAS DE LA TECNOLOGÍA LED
• Máxima autonomía. Las bombillas incandescentes (incluyendo las de Xenon y Krypton) pierden el 90% de energía al transformarse en calor. Con el LED, casi la totalidad de la energía se transforma en luz. En una linterna, tras 32 minutos de uso presenta solo el 50% de su pontencia y tras 6 horas pierde completamente su capacidad lumínica, mientras que a una linterna con LEDs esto solo le ocurre tras varios días de uso.
• Ahorro económico. Debido al bajo consumo y larga duración de los LED, supone que en el vehículo el cableado es más fino y los elementos generadores de electricidad también son más pequeños.
• Reducción de reparaciones. En caso de utilización ininterrumpida los LED tienen una vida útil de unos 11 años, por lo que ya no son necesarios los repuestos, en comparación con las bombillas convencionales que solo garantizan un uso de 60
horas.
• Resistencia a los golpes. El cristal no brilla como un filamento, se encuentra dentro de una lente de plástico transparente (sin cristal), por lo que puede dejarse caer, tirarse o pasar por encima con el coche sin dañarlo.
• Conservación medioambiental. El menor consumo de energía disminuye la demanda de pilas, reduciendo la cantidad de residuos tóxicos que estas producen.
• Resistencia al agua. Los LEDs son resistentes al agua.
COLOR Y LUZ DE LOS LEDs
Los LEDs emiten luz difusa, aportando numerosas ventajas a un alcance aproximado menor
de diez metros. Para iluminación a distancias mayores, las bombillas halógenas los superan
en potencia.
De este modo, los espacios se iluminan de forma más homogénea sin bruscos contrastes ni
‘aros’ de luz, lo que permite una mejor orientación y percepción de los detalles.
La luz que generan es azulada (efecto de «luz de día»), con lo que nuestra visión nocturna
se ve menos afectada que con las bombillas tradicionales, ofreciendo una mejor visión y
percepción de la profundidad y los detalles. Cuando la usemos de forma intermitente también tendrá un menor impacto en la visión nocturna.
Al parecerse tanto a la luz solar, si se proyecta contra una pared a la luz del día podrá comprobarse que no parece tan potente como una clásica luz amarilla. En cambio, haciendo
la prueba en la oscuridad es donde realmente se aprecia la gran diferencia lumínica.
NUEVO CONCEPTO DE VISIBILIDAD DE VOLVO
Más del 90% de toda la información importante para el conductor entra a través de las ventanas y del parabrisas del coche. Si mejoramos la calidad de esta información visual, también mejoraremos la capacidad del conductor de tomar las decisiones correctas en las situaciones difíciles, evitando colisiones», comentó Stephan Rouhana, especialista técnico de Seguridad, Ford Motor Company.
Este SCC de Volvo, fue diseñado «en base a los ojos del conductor» para asegurarle una mejor visibilidad. Por ellos, posee un sensor que identifica la localización de los ojos cuando el conductor se sienta en el asiento, el que se ajusta automáticamente para satisfacer la posición de los ojos y ofrecerle el mejor campo visual posible.
Además, el piso, los pedales, el volante, el panel de instrumentos, y la palanca de cambios, se mueven para asegurar que todos los controles están dentro del alcance conveniente para el conductor, quien puede realzar la visibilidad y comodidad adaptando los controles a su medida. El conductor, entonces, se encuentra con una comprensión más clara de qué está sucediendo fuera del coche y en el tablero de instrumentos.
«Gracias al constante desarrollo tecnológico, estamos accediendo a computadoras más pequeñas con gran alcance, y sensores nuevos. El acierto de Volvo es utilizar las brechas de una manera inteligente y sensible. Combinamos electrónica de avanzada con los nuevos materiales y las nuevas soluciones mecánicas de diseño para crear ventajas para el cliente. Un ejemplo de esto es el Volvo SCC y su realzada visibilidad versátil», dice Hans Gustavsson, Jefe de Investigación y Desarrollo en Volvo. Características principales del SCC
El Volvo SCC demuestra avances en varios proyectos de investigación y desarrollo en los campos de la seguridad, y ofrece funciones adicionales que mejoran la visibilidad.
• Visibilidad
Entre las características que posee se destacan la visibilidad que tiene el conductor a través de los pilares soporte del parabrisas, pilares A, como resultado de una caja metálica combinada con Plexiglás. Asimismo, a través de los pilares B, que están situados entre las puertas delanteras y traseras y se curvan hacia adentro siguiendo los contornos del asiento, el conductor obtiene un campo visual sin obstáculos a la parte trasera.
• Sensor
Este Concept de Volvo ofrece un sensor situado fuera de los vidrios traseros que detecta un vehículo y alerta al conductor sobre el «punto ciego». Además, los haces de luz se adaptan al camino y a la velocidad siguiendo la dirección del conductor, una luz infraroja realza la visión nocturna más allá del alcance de las luces del vehículo, y una cámara delantera supervisa la posición del automóvil en el camino y alerta el conductor si hay alguna tendencia a virar.
 NIGHT VISION
NIGHT VISION
El Night Vision utiliza una moderna cámara de infrarrojos que, mostrando en un monitor la carretera y el área próxima al coche, garantiza un alcance de visión cinco veces superior al de cualquier otro sistema convencional. Los sensores detectan las diferencias de temperatura de los diversos objetos que se hallan al alcance de dichos medidores. La imagen térmica se proyecta en una pantalla en la parte inferior del parabrisas. De este modo, pueden detectarse personas, animales, vehículos abandonados y otros obstáculos ocultos en la oscuridad con una antelación que puede ser providencial.

 FAROS DE XENÓN
FAROS DE XENÓN
Los faros de xenón son componentes presentes en gran parte de los vehículos que actualmente circulan por nuestras carreteras. Se trata de un sistema de iluminación con alto rendimiento luminoso que aumenta la seguridad activa durante la conducción al aumentar el tiempo de reacción ante un peligro, que se advierte con mayor antelación respecto a los sistemas convencionales.
En esta edición de El Periódico del Taller explicaremos el concepto de seguridad y diseccionaremos los faros de descarga de gas o de luz de xenón y descarga de gas bixenón, así como su funcionamiento y precauciones que se deben tener en cuenta a la hora de manipularlos para su mantenimiento o reparación.

CONCEPTO DE SEGURIDAD
En muchos modelos de automóviles actuales se puede contar como opción con faros de alto rendimiento luminoso dotados de lámparas de xenón. El mayor rendimiento luminoso de este sistema aumenta la seguridad activa, ya que se pueden ver los peligros con más antelación y se dispone por tanto de más tiempo para reaccionar.Velocidades:
Coche: 50 km/h, Bicicleta: 25 km/h
Con (a) se representa la ganancia de tiempo con el sistema de faros de xenón. En este ejemplo es de 1 s.Si el vehículo está dotado de faros de xenón, se distingue con mayor antelación al ciclista, permitiendo que el conductor pueda frenar a tiempo.
 COMPONENTES DEL FARO
COMPONENTES DEL FARO
Los componentes del sistema, unidad de control y bloque de encendido, suelen estar incorporados en el faro. No obstante, también existen modelos en los que la unidad de control está en una pletina sujeta cerca de las torretas de amortiguación. Normalmente, los componentes del faro de descarga de gas pueden sustituirse por
separado.

LÁMPARA DE DESCARGA DE GAS FUNCIONAMIENTO DE LA LÁMPARA DE DESCARGA DE GAS
DESCARGA DE GAS
La luz se genera por medio de un arco voltaico de hasta 30 KV, entre dos electrodos tungsteno situados en una cámara de vidrio, cargada con gas xenón sales de metales halogenizados. El arco es generado por una reactancia que produce una corriente alterna de 400 Hz. En el interior de la lámpara se alcanza una temperatura de aproximadamente 700 OC.
Una vez efectuado el encendido, se hace funcionar la lámpara de descarga de gas aproximadamente durante 3 segundos, con una corriente de mayor intensidad. El objetivo es que la lámpara alcance su claridad máxima tras un retardo mínimo de 0,3 segundos. Debido a este ligero retardo no se utilizan lámparas de descarga de gas para la luz de carretera. En virtud de la composición química del gas, en la ampolla de la lámpara se genera una luz con un elevado porcentaje de luz verde y azul. Esa es la característica de identificación exterior de la técnica de luminiscencia por descarga de gas.
Las ventajas de este nueva generación de faros, en comparación con la tecnología de las lámparas convencionales, son:
Rendimiento luminoso hasta tres veces superior, con la misma absorción de corriente. Para generar el doble de intensidad luminosa que una lámpara convencional de 55 W, se utiliza una descarga de gas de sólo 35 W. De esta manera se reduce el consumo aproximadamente en un 25%. La vida útil es de unas 2.500 horas. Cinco veces más que una lámpara halógena. Mediante una configuración especial del reflector, visera y lente se consigue un alcance superior y una zona de dispersión más ancha en la zona de proximidad. De esta forma se ilumina mejor el borde de la calzada, lo cual reduce la fatiga visual
del conductor.

PRECAUCIONES
• Debido a que la lámpara de descarga de gas recibe tensiones eléctricas de hasta 30 KV, es imprescindible extremar las medidas de seguridad. El faro con cámara de descarga de gas y el bloque de encendido tienen rótulos de aviso a este respecto.
• Debido a la alta potencia luminosa de este tipo de lámparas, se debe evitar la observación directa y frontal del faro.
• Desconectar el borne negativo de la batería antes de proceder al desmontaje o instalación.
• Si el faro de xenón está encendido, no tocar la instalación, la bombilla o el enchufe sin protegerse las manos con guantes. Si el faro de xenón está encendido, no tocar la instalación, la bombilla o el enchufe sin protejerse las manos con guantes.
• No realizar tareas de mantenimiento en el faro de xenón con las manos húmedas.
• Para encender el faro de xenón, la lámpara debe estar instalada en su alojamiento (nunca encender el faro con la lámpara de xenón fuera de éste).
• Asegurarse de instalar la lámpara de forma adecuada, si se instala de forma incorrecta, pueden producirse fugas de alta tensión que deteriorarían la lámpara y el enchufe.
 FAROS CON LÁMPARAS DE DESCARGA DE GAS BIXENÓN
FAROS CON LÁMPARAS DE DESCARGA DE GAS BIXENÓN
En los sistemas anteriores no era posible generar las luces de cruce y carretera con un sola lámpara de descarga de gas. No se podía modificar el límite claro-oscuro durante el funcionamiento.
Ahora es posible utilizar la luz de xenón para cruce y carretera, haciendo intervenir
un obturador mecánico “shutter”, cuya posición se conmuta por medio de un electroimán.
Con este mecanismo obturador se cubre una parte de la luz generada por la lámpara, para configurar así la luz de cruce. Al pasar el mecanismo a la posición de carretera se deja pasar la totalidad de la luz generada por la lámpara.
Se sigue manteniendo una lámpara H7 para la función de ráfagas, ya que la bombilla de xenón, debido a las características de inflamación del gas para la producción de luz, no puede trabajar en la función de apagado y encendido rápido.

 REGULACIÓN AUTOMÁTICA DEL ALCANCE LUMINOSO
REGULACIÓN AUTOMÁTICA DEL ALCANCE LUMINOSO
Para evitar la posibilidad de deslumbrar a los conductores que circulan en sentido contrario, la legislación obliga a que los vehículos con faros de descarga de gas dispongan de un sistema regulador automático de alcance luminoso.

UBICACIÓN DE COMPONENTES FUNCIÓN DE EMERGENCIA
Si se presenta alguna avería eléctrica en la regulación automática del alcance luminoso, los servomotores del sistema desplazan automáticamente el enfoque de los faros a su posición más baja. De esta forma, el conductor se percata de la avería.
SUSTITUCIÓN DE UNA LÁMPARA
Esta operación debe realizarse en el taller. Los fabricantes suelen sujetar las tapas con tornillos torx para que el conductor no sustituya la lámpara. El trabajo no encierra dificultad especial, hay que respetar las normas de seguridad descritas con anterioridad y consultar la documentación del fabricante respecto al proceso de desmontaje.
UBICACION DE COMPONENTES

¿Ojo con el combustible Diesel?

La mayor razón del aumento continuo de las emisiones diesel es el tremendo aumento de transporte de mercancía por camiones diesel en todo el territorio nacional. Pero también hay una gran cantidad de vehículos deportivos y camiones pequeños que trabajan con combustible diesel. A pesar de que estos vehículos usan el combustible más eficientemente que los que trabajan con gasolina, sus emisiones son mucho más peligrosas. Detrás de estas tendencias existe el problema de las regulaciones mínimas para el uso de diesel, las cuales hasta ahora se han escapado de los controles más estrictos impuestos por el gobierno a la gasolina.
Las emisiones de diesel son sucias — mucho más sucias que las de la gasolina. Causan una mayor contaminación y tienen peores efectos en la salud. Estas emisiones son una de las mayores causas del dióxido de nitrógeno, oxidos de asufre que, por ejemplo, causan el smog.
Las pequeñas partículas de los motores diesel son también muy peligrosas. Virtualmente todas ellas son más pequeñas que un micrón. (Hay 25,400 micrones en una pulgada — el punto(.) al final de esta frase, tiene cientos de micrones a lo ancho. (Estas diminutas partículas pueden evadir las defensas del sistema respiratorio y depositarse en los pulmones. (En general, partículas de menos de 10 micrones en diámetro presentan este problema.) Ellas pueden causar efectos a corto plazo, como dificultad en respirar, tos, así como problemas crónicos respiratorios. Estas partículas respirables son especialmente peligrosas para los ancianos y aquellas personas con problemas respiratorios y enfermedades cardiovasculares.
El diesel empleado en nuestro pais es el comunmente llamado ACPM (aceite combustible para motor) es un hidrocarburo derivado del petroleo; compueto organico que contiene carbono,azufre y hidrogeno.
Como nuestro combustible presenta niveles de azufre sumamente elevados muy por encima de los estandares internacionales que se encuentran en 50 ppm (partes por millon). El diesel colombiano se encuentra en un rango de 4500ppm a 2000 ppm y es el generador de material particulado (PM) inferiores a 10 micras(hollin,humo y polvo) que tanto incide en las enfermedades repiratorias tales como neumonia y bronquitis; en las enfermedades como la gastritis provocada por el aumento de la acidez en el tracto digestivo originada por los oxidos de azufre y nitrogeno que al llegar a las partes humedas de nuestro sistema digestivo reaccionan y forman acidos que provocan esta enfermedad, ademas reaccionan con la humedad del ambiente formando las famosas lluvias acidas.
Un partametro muy importante que debe cumplir el diesel es su indice de CETANO, que indica la facilidad con la que se inflama el combustible en los motores diesel, es decir cuanto mas facil se inflame mejor sera el combustible.
Cuanto mas elevado sea el numero de cetano mejor sera la calidad de la combustion.
Si el numero de cetano es demasiado bajo, la combustion es inadecuada y da lugar a ruidos excesivos, aumento en las emisiones,reduccion del rendimiento del motor y aumento en la fatiga del motor.
 Los motores modernos requieren un numero de cetano de 51 como minimo,recordemos que entre mas alto sea este numero mejor sera su quemado.
Los motores modernos requieren un numero de cetano de 51 como minimo,recordemos que entre mas alto sea este numero mejor sera su quemado.
El numero de cetano es lo contrario al numero de octanaje de la gasolina.
Las particulas de carbono mediante la combustion generan hollin o material particulado (P.M2.5 y P.M10), las cuales dan lugar a la opacidad de los gases de escapes, cusando problemas respiratorios y produciendo ennengrecimiento de las construcciones y edificios.
Los motores se diseñan y construyen bajo condiciones de nivel del mar, que es la altura a la cual se obtiene el maximo desempeño del motor, dado que el proceso de la combustion de la combustion en esa altura es optimo.
A medida que ascendemos, la concentracion de oxigeno en el aire va disminuyendo, dando como resultado que el proceso de la combustion sea inadecuado y aumenta las emisiones de gases contaminantes por el escape. Lo anterior produce una perdida del 10 porciento de potencia y torque por cada mil metros de ascenso en vehiculos de aspiracion natural y menos del 15% en los motores turbo cargados.
LAS EMISIONES
Los motores de combustion interna son la mayor fuente de contaminacion del Medio Ambiente,contribuyendo esto a la formacion del smog, e incrementando el problema de salud en los seres vivos del planeta y acabando con el medio ambiente.
La contaminacion en los motores DIESEL es peligrosa,en especial en paises como los nuestros en los cuales no existen reglamentaciones, o no haven cumplir las mismas, la ausencia de normas al respecto, hacen que los habitantes de las grandes ciudades respiremos sustancias nocivas, con alto contenido de veneno.
Estos contaminantes Son:
Nox→ Oxidos de Nitrogeno(oxidos nitricos). contribuyen a la formacion del smog y la lluvia acida.
N2→ Nitrogeno, reacciona a alta presion y temperatura para formas Nox (oxidos de nitrogeno)
H20→ Es inherente al proceso de la combustion
VOCs→ Componentes Organicos Volatiles
PM10→ Material particulado menor de 10 micrones
CO→ Monoxido de carbono
C02→ Dioxido de carbono
CH4→ Gas metano
S0x→ Oxidos de azufre
H2S04→ Acido sulfurico
MS04→ Sulfato de magnesio
Estos compuestos estan relacionados con la cantidad de azufre que contiene el petroleo al extraerlo.Por normas internacionales, el azufre en el combustible debe estar en 50 ppm (partes por millon),Cuando se condensa en la atmosfera caus la lluvia acida. El Nox y los VoCs en presencia de la luz solar y del calor reaccionan para formar el ozono, este se produce de forma natural en la atmofesra, como un gas que protege la tierra de las radiaciones ultravioletas.
A nivel del piso el ozono causa inflamacion de los pulmones y reduce su capacidad de funcionamiento y su resistencia a la infeccion.
Existen niveles de seguridad y de aceptacion de ozono en el aire respirable, pero las persona con problemas del corazon o pulmonar son particularmente vulnerables a sus efectos dañinos.
El smog es una mezcla de gases contaminantes solidos y liquidos muy dañinos para la salud humana, afectando tambien la vida en la naturaleza.
El material Particulado Es la mezcla de particulas solidas y gotas liquidfas que se encuentran en el aire, por la gran variedad de fuentes donde se desarrollan las podemos encontrar de 10 a 2.5 micrones, y mas pequeñas de 2.5 micrones que son las que se generan en los motores de combustion interna.
Estas particulas son las mas riesgosas para la salud, ya que su diametro puede ser mas pequeño que 0.1 micrones, pudiendo penetrar profundamente en los pulmones de forma directa a los alveolos(celulas que llevan el aire alos pulmones) muchas de estas particulas son cancerigenas.
El CO Se genera cuando hay cantidad insuficiente de oxigeno en la camara de combustion. Cuando los seres vivos inhalan CO,este se diduelve en la sangre y se detiene la capacidad de repartir el oxigeno.
Si respiramos grandes cantidades de CO,provoca la muerte.
El HC Se genera tambien por combustion incompleta,cuando mas rica sea la mezcla de aire-combustible menos HC se genera,Cuanto mas pobre sea mas HC se genera.
Si se inhala HC se convierte en un agente cancerigeno. Genera tambien humo fotoquimico.
El N0x se genera mediante el Nitrogeno y el oxigeno existente en la mezcla aire-combustible, cuando la temperatura en la camara de combustion supera los 1800 grados centigrados, cuanto mas aumente la temperatura de combustion mas N0x se genera.
Cuando la mezcla aire -combustible es pobre, se genera mas N0x ,porque la relacion de oxigeno de la mezcla aire-combustible es demasiado alta.
Se deduce que el N0x aumenta o disminuye deacuerdo a la temperatura y a la concentracion de oxigeno.
Se puede entonces afirmar que gran parte de los contaminantes de los gases de escape,inhalados en una fuerte dosis son muy nocivos para la salud. Algunos de ellos provocan enfermedades graves en el sistema respiratorio y en la piel, mientras que otros en ciertas condiciones,pueden provocar la muerte a corto y largo plazo.
El monoxido de carbono C0 es un toxico violento, los hidrocarburos no quemados o evaporados,los oxidos de nitrogeno y los dioxidos de azufre atacan a als vias respiratorias, las particulas podrian ser cancerigenas.
les comparto un video que hicieron uno colegas de mexico referente a la contaminacion que hay en su pais, sabiendo que mexico es una de las ciudades mas contaminadas del mundo
Imagen
INTERFERENCIA DE FRECUENCIAS DE RADIO
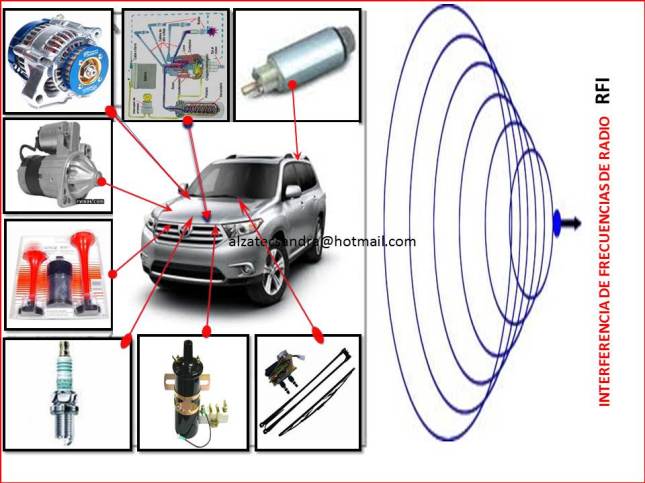
Los sistemas elecetricos del vehiculo son una gran fuente de interferencia de frecuencias de redio RFI. La mayor parte de las RFI en un automovil estan asociados con algunos accesorios, el Alternador y el sistema de encendido. Frecuentemente es el resultado de un mantenimiento deficiente o de una instalacion con conductores NO adecuados o en pesimo estado.
Las RFI pueden afectar los sistemas de alarmas por radar, o los sistemas de comunicaciones militares o de policia y los sistemas de misiles dirigidos.
Los automoviles nuevos estan equipados con computadoras y otros instrumentos que pueden ser afectados por las RFI.
Por esta razon las instalaciones de alta deben utilizar un cable de supresion de radiacion de encendido IRS a lo largo de la totalidad del cable de encendido. Esto evitara que el actue como antena para radiar el ruido (RFI) que se produce al saltar la chispa en los electrodos de la bujias.
La interferencia que causa un rechinido de tono alto en el radio y que se incrementa y cambia con la velocidad del motor esta generalmente asociada al alternador. Para solucionarlo se le puede instalar un capacitor en el terminal de salida del alternador.
Interferencia causada por motores electricos
La interferencia causada
por los motores electricos de la ventilacion de aire o del limpiabrisa tambien puede ser minimizada instalando un capacitor de derivacion dependiendo del caso.
Interferencia causada por el distribuidor
Algunos vehiculos utilizan protectores de RFI en el distribuidor o en la punta del rotor
Ubicacion de las masas del vehiculo de inyeccion electronica
Si las masas principales de un vehiculo moderno (mas motor -chasis,baul-guardafangos) estan debidamente conectadas protegen al vehiculo contra las RFI.
Si estas masas del vehiculo no se encuentran bien conectadas o faltan algunas de ellas. Las piezas que no tengan estas masas sirven como antenas para irradiar el ruido, en algunos casos provocan el mal funcionamiento del vehiculo ya que estas interferencias RFI modifican el funcionamiento de las señales que lee la computadora (Ruido)
Los inyectores y su limpieza
Los inyectores son electrovalvulas.
En su interior hay una bobina, una armadura, un resorte y una válvula.
Cuando una corriente eléctrica pasa a través de la bobina, se crea un campo magnético que
hace que la válvula se abra.
Es importante recordar que después de un tiempo prolongado del uso de un vehículo con
sistema de inyección de gasolina se efectúe la limpieza de los inyectores, debido a la formación
de sedimentos en su interior que impiden la pulverización adecuada del combustible dentro del
cilindro, produciendo marcha lenta irregular, perdida de potencia que poco poco se va
apreciando en la conducción.
Se puede adquirir en las tiendas de partes , líquidos limpiadores de inyectores que se pueden
agregar al combustible, y que son relativamente efectivos. Estos limpiadores se le pueden
agregar al combustible periódicamente, considerando este procedimiento como un programa
de mantenimiento regular.
Otra forma de limpiar los inyectores mas rápidamente es inyectar en el sistema de inyección
solventes desincrustadores directamente con el combustible en las tuberías mientras el motor
se encuentra en marcha acelerada a un nivel de R.P.M. que permita el arrastre de las
incrustaciones y el carbón que se puedan haber depositado en los inyectores.
Esto se denomina limpieza de inyectores sin desmontar del motor.
Otro procedimiento de mayor efectividad, es el de limpiar los inyectores desmontándolos de su
alojamiento y también desmontando los rieles de combustible.
Sumergirlos en solventes para limpieza de los mismos y a los inyectores colocarlos en equipo
de ultrasonido para que puedan desprenderse de su interior todos los residuos carbonosos y
luego hacerlos funcionar a cada uno con un generador de pulsos.
Esto se denomina limpieza de inyectores sin desmontar del motor.
Terminada la operación limpieza, se montan en un banco de caudales para reproducir el
funcionamiento y medir el rendimiento de cada uno que no debe superar un 10 por ciento
entre todos los inyectores.
En aquellos casos que un o unos inyectores se encuentren por debajo del 10 por ciento del
mejor se deben inspeccionar para ver si todavía no están suficientemente limpios o
reemplazarlos por defectuosos.
Cuando se reinstalan los inyectores se deben reemplazar los anillos Ö de cada inyector para
asegurarse para que no se produzcan perdidas de combustible que son tan peligrosas.
Cuando se trabaja en las tuberías de combustible en un sistema de inyección se debe tener
muy en cuenta que el sistema puede estar bajo presión, por lo tanto lo primero que se debe
hacer antes de desmontar algo, es sacarle la presión de combustible remanente, para lo cual
se deben colocar alrededor de las tuberías trapos absorbentes o papeles que puedan retener
todo el combustible para que no se derrame, porque puede ser fatal, considerando el grado de
inflamabilidad de la gasolina.
Limpieza de inyectores por ultrasonido:
Este procedimiento consiste en desmontar los inyectores del motor y luego ponerlos a
funcionar dentro de un Equipo de Ultrasonido.
Los inyectores deben estar funcionando bajo la acción de un Generador de pulsos y al mismo
tiempo estar sometidos a la acción de un Equipo de Ultrasonido.
Un equipo de ultrasonido limpia por el fenómeno de Cavitacion Ultrasónica.
La cavitación ultrasónica es el fenómeno mediante el cual es posible comprender el principio
del lavado por ultrasonido.
En un medio líquido, las señales de alta frecuencia producidas por un oscilador electrónico y
enviadas a un transductor especialmente colocado en la base de una batea de acero inoxidable
que contiene dicho liquido, generan ondas de compresión y depresión a una altísima velocidad.
Esta velocidad depende de la frecuencia de trabajo del generador de ultrasonido.
Generalmente estos trabajan en una frecuencia comprendida entre 24 y 55 KHz. Las ondas de
compresión y depresión en el líquido originan el fenómeno conocido como «Cavitación
Ultrasónica
Limpieza de inyectores sin desmontar:
Para este procedimiento se suele usar un equipo especialmente diseñado para tal fin.
La técnica consiste en realizar un puente entre la llegada de combustible y el retorno hacia el
tanque, de tal forma que el combustible retorne sin pasar por el riel.
Luego se ingresa un combustible “ Limpiador “ por la entrada de combustible hacia los
inyectores, a la presión de trabajo, y se hace funcionar el motor con este combustible.
Este producto combustible, tiene la particularidad que al pasar por los inyectores., limpia los
mismo en su interior.
Es un sistema efectivo, sobre todo en aquellos motores donde es complicado desmontar
inyectores. Pero no es una limpieza tan profunda y además no se pueden probar los inyectores
en un banco de comprobación.
De todas formas es efectiva en muchos casos.
Comprobación de Inyectores:
Los inyectores pueden ser comprobados en un banco de pruebas.
El equipo consiste en un sistema similar al del mismo vehículo y con el cuál se le entrega
presión de un liquido de comprobación a los inyectores.
Un generador de pulsos excita los inyectores a una frecuencia similar al rango de trabajo que
los mismos tienen en el motor del automóvil.
El liquido que liberan los inyectores es recogido en probetas calibradas y así se puede verificar
la cantidad de liquido inyectado en forma comparativa.
Se permite hasta un 10 % de diferencia entre los volúmenes vertidos en las probetas.
NEUMATICOS SIN AIRE
 Los neumáticos son la base de cualquier vehículo que se precie de tal, así como la publicidad lo decía “la potencia sin control no sirve de nada” es más que importante tener nuestros neumáticos en perfecto estado ya que el gran rango de accidentes de transito y más en rutas el mal estado de los neumáticos ocasiona grandes problemas. Así por ejemplo en rutas el 30% de los accidente se debe a problemas en los neumáticos que no tienen porque ser neumáticos tan solo en mal estado sino en un punto que muchos tal vez no han enfocado sus ojos y es la presión de los mismos. Por ello los fabricantes muy en silencio se dedican a desarrollar diferentes tecnologías con un único fin global y es la seguridad del usuario, pero también para mejorar el desempeño de los automóviles por ello cada fabricante tiene sus compañías favoritas.
Los neumáticos son la base de cualquier vehículo que se precie de tal, así como la publicidad lo decía “la potencia sin control no sirve de nada” es más que importante tener nuestros neumáticos en perfecto estado ya que el gran rango de accidentes de transito y más en rutas el mal estado de los neumáticos ocasiona grandes problemas. Así por ejemplo en rutas el 30% de los accidente se debe a problemas en los neumáticos que no tienen porque ser neumáticos tan solo en mal estado sino en un punto que muchos tal vez no han enfocado sus ojos y es la presión de los mismos. Por ello los fabricantes muy en silencio se dedican a desarrollar diferentes tecnologías con un único fin global y es la seguridad del usuario, pero también para mejorar el desempeño de los automóviles por ello cada fabricante tiene sus compañías favoritas.
Se creo un neumático que no se pincha ya que simplemente no tiene aire en su interior. Por más que el concepto de neumáticos sólidos de caucho no sea nuevo la idea de madurar esta propuesta y llevarla a los coches de calle es interesante, actualmente neumáticos similares a este tipo son utilizados en maquinas pesadas y en algunos tipos de vehículos militares. Así debido a que muchos vehículos militares sufrían ataques y eran precisamente atacados en sus neumáticos la idea tuvo que surgir.
 Basados en dos conceptos diferentes y fabricados con tecnología compuesta y nuevos materiales, estos dos productos, que no son neumáticos, podrían hacer que el pinchazo pasara definitivamente a la historia y que desapareciera la necesidad de revisar las presiones.
Basados en dos conceptos diferentes y fabricados con tecnología compuesta y nuevos materiales, estos dos productos, que no son neumáticos, podrían hacer que el pinchazo pasara definitivamente a la historia y que desapareciera la necesidad de revisar las presiones.
representa la fusión del neumático (Tire) y de la llanta (Weel) y ha sido pensado para aportar un auténtico avance a la movilidad. Actualmente, el neumatico sin aire puede equipar a vehículos que desarrollen una escasa velocidad y que transporten poco peso, y se encuentra en la fase de prototipo para su aplicación en vehículos de pasajeros. Inicialmente se emplearán dimensiones pequeñas, como las que llevan las sillas de ruedas para disminuidos físicos. El nuevo neumático es construido con una red de rayos que comienzan en la parte interior del neumático hasta una capa externa la cual es igual a la que todos conocemos. Estos rayos entrelazados son fabricados de una resina especial producida con plásticos reciclados que soportan muy bien la tensión ofrecida por el peso depositado en el neumático. La idea surgió por dos ámbitos simples y claros, se quería fabricar neumáticos que fueran ecológicos o que al menos utilizaran productos que hoy son desechados y a su vez que este producto final sea novedoso para el sector. Así luego de algunas ideas externas y viendo los neumáticos sólidos de la actualidad creo este interesante producto.
El concepto es semejante a la malla de metal utilizada en los neumáticos convencionales que forman un esqueleto sobre el cual el caucho es moldeado. La red de rayos y que divide a la perfección el peso evita que este tenga deformaciones excesivas así como problemas de estabilidad. Los modelos presentados tienen apenas 22 centímetros de diámetro pero fueron probados con suceso en pequeños vehículos eléctricos. Como ellos no dependen del aire para funcionar ni ningún tipo de presión de aire eventuales pinchaduras en la banda de rodaje no serían problema. Los fabricantes todavía no informa si los neumáticos son totalmente reciclables. Por eso al parecer los neumáticos al llegar a los automóviles vendrían con tan solo un problema que sería tener que cambiar la pequeña banda que toca el suelo cada un tiempo determinado. Así el producto sería un poco costoso en su comienzo pero luego cada cambio de banda tendría un precio menor a los actuales neumáticos.

También están previstas utilizaciones en pequeñas máquinas de obras públicas y en vehículos militares, ya que el Neumatico sin aire es extremadamente resistente. Ofrece las prestaciones de un neumático radial, al tiempo que incrementa notablemente la rigidez lateral, con efectos en la conducción, el apoyo en curva y la capacidad de respuesta.
Además, las aportaciones tipo suspensión del neumatico sin aire pueden simplificar, y en algunas aplicaciones eliminar, la necesidad de una suspensión aparte para el vehículo. La estructura está compuesta por una banda de rodamiento de caucho, unida a la rueda por radios flexibles, lo que simplifica enormemente las operaciones de montaje y desmontaje.
Cuidado al cortar cables en con los vehiculos. ¿ Sistemas Multiplexados?
Sistemas Multiplexados
Las instalaciones eléctricas de los automóviles actuales se están haciendo
cada día más complejas, debido al considerable incremento de los aparatos
eléctricos que se disponen, tanto para la seguridad de marcha del vehículo
como para el confort de los pasajeros. Las unidades electrónicas de gestión del
motor, los sistemas de frenado antibloqueo, las suspensiones pilotadas, los
sistemas de climatización automáticos, etc, requieren de un gran número de
sensores ubicados en lugares muy distantes entre sí, y que es preciso conectar
a la unidad de control, lo cual supone incrementar notablemente el número de
hilos conductores, resultando de ello que la instalación eléctrica se hace
extremadamente compleja.
Por otra parte, si los mazos de cables de esta instalación atraviesan zonas
móviles, como es el caso de la instalación de puertas (espejos retrovisores con
mando eléctrico, elevalunas. cierres centralizados, etc.), la flexibilidad del
cableado es escasa en las zonas de articulación y surgen problemas de
Habilidad y duración.
La idea de utilizar un solo cable para realizar varias funciones ha tomado forma
en los últimos años y ya se están aplicando en los automóviles los circuitos
multiplexado que, combinados con los sistemas clásicos, suponen una
importante reducción del cableado. El multiplexado utiliza una serie de cajetines
electrónicos interconexionados entre sí, que enlazan los diferentes aparatos
Sincronización – Inyección Electrónica y Control Computarizado de Motor OBD II
receptores con los órganos de mando y control de los mismos de forma
electrónica, en lugar de hacerlo a la manera convencional, mediante la clásica
instalación eléctrica, consiguiéndose con ello una notable simplicidad de la
instalación.
Clases de Multiplexado
Las clases A Para el multiplexado Maestro / esclavo, caudales bajos,
bajo coste.
Las clases B Para el multiplexado Multimaestros, caudales medianos.
Las clases C Para el multiplexado Multimaestros, caudales altos.
Las clases D Para las conexiones ópticas de datos.
Principios básicos del multiplexado
La figura siguiente muestra la disposición de circuito multiplexado para el
gobierno de diferentes lámparas, por ejemplo de un piloto trasero. Cada una de
ellas está conectada a un cajetín electrónico B2 alimentado directamente desde
la batería v que se integra en el propio piloto o en sus inmediaciones, con lo
cual el circuito de potencia puede ser común a varias lámparas y acortarse
notablemente. Por otra parte, cada uno de los interruptores de mando o
sensores que activan estas lámparas está conectado a otro cajetín electrónico
(Bl) ubicado en el lugar más apropiado para simplificar el cableado. Estos dos
cajetines electrónicos se interconectan a través de una unidad de
interconexiones BIC, controlada por una unidad central UC. Con esta
disposición, las maniobras de accionamiento o parada de cada uno de los
interruptores o sensores son recogidas en la unidad central y. debidamente
procesadas, son enviadas a la unidad electrónica de accionamiento de las
lámparas, que comanda el encendido o apagado de las mismas.
Los circuitos mulliplexados como el descrito posibilitan la función de
autodiagnóstico de la instalación, pues en su funcionamiento la unidad central
está recibiendo continuamente información del estado de los interruptores o
sensores y detectando el funcionamiento correcto de cada uno de los
receptores, de manera que si alguna de estas informaciones falla es detectada
inmediatamente, alertando al conductor de la anomalía. Por otra parte, dado
que el circuito de potencia de los receptores es directo a través del cajetín
electrónico B2, los interruptores de mando pueden ser más pequeños y
sencillos, ya que por ellos no ha de pasar la corriente de alimentación de los
receptores (función relé). Igualmente, es posible comandar varios receptores
con un solo interruptor, o. al contrario, mediante v arios interruptores puede
comandarse un solo receptor, todo ello con una instalación eléctrica sencilla,
disminuyendo el número de interconexiones.
A la técnica utilizada en comunicaciones para transmitir simultáneamente
varias señales diferentes, a través de una sola línea, se la denomina red
multiplexada. Para mantener la integridad de cada una de las señales a lo largo
del canal, el multiplexado permite separarlas por tiempo, espacio o frecuencia.
El dispositivo utilizado para combinar las señales se denomina multiplexor y es
un dispositivo que transmite de forma simultánea varias informaciones por un
solo canal, sin que ninguna de ellas pierda su identidad, empleando la técnica
de división del tiempo.
Las redes multiplexadas agrupan y conectan entre si las centrales electrónicas
de un vehículo compartiendo información de los sensores de los diferentes
sistemas de control y gestión, como el sistema de inyección del motor, la
climatización, los frenos con antibloqueo, etc. De esta forma, un mismo sensor,
como el de régimen motor, puede suministrar información a los distintos
sistemas, que la comparten. La red de transmisión de datos ha de ser capa/ de
aceptar información, coinvertirla a un formato que se pueda enviar rápidamente
y de forma fiable, transmitir los datos a un determinado lugar y, una vez que los
datos han llegado, volverlos a convertir a un formato que el destinatario (ya sea
máquina o ser humano) pueda entender.
Para comunicar las diferentes unidades electrónicas es preciso definir las
reglas de transmisión de datos, denominadas protocolo, las cuales regulan la
codificación de la información, velocidad de transmisión, etc. El soporte de
transmisión utilizado es un par de cables o la fibra óptica, denominado bus.,
que interconecta las unidades electrónicas. El par de cables o par trenzado es
el medio más simple y cómodo de bus de transmisión. Se trata de dos hilos de
cobre aislados y trenzados para reducir las interferencias electromagnéticas.
Sincronización – Inyección Electrónica y Control Computarizado de Motor OBD II
Estructura de una red multiplexada
Las redes multiplexadas permiten optimizar la instalación eléctrica al ubicar las
unidades de control de los diversos sistemas en una posición centralizada
respecto a las funciones que gestionan. Ello permite minimizar la instalación de
distribución de la potencia y de las señales, incluso, mediante la utilización del
multiplexado. En una definición amplia, los buses multiplexados son sistemas
de comunicaciones digitales en los que los elementos conectados comparten
una misma línea (BUS) por la que intercambian datos y señales de control.
En muchos vehículos actuales, los dispositivos eléctricos como los elevalunas,
cierres centralizados de puertas, antiarranque, alarma, etc, están
interconexionados a través de una unidad central que controla todos los
sistemas por medio de una red multiplexada. la cual conecta por una línea BUS
las unidades electrónicas de cada uno de los sistemas. Ello permite que el
aumento de funciones en los diferentes sistemas no represente un incremento
del cableado, sino al contrario, una reducción del mismo, al tiempo que se evita
la duplicidad de algunos sensores, cuyas señales son utilizadas por los
distintos sistemas, transmitiéndolas a las unidades de control de los diferentes
dispositivos a través de la línea BUS. Por otra parte, permite disponer de un
sistema de autodiagnosis para la localización rápida de averías.
La configuración típica de un vehículo multiplexado consiste en una unidad
central a la que se conectan varios buses con unas características de velocidad
acordes con los requisitos de tiempo real de los elementos conectados. Los
elementos electrónicos de confort y carrocería se conectan normalmente a
buses de menor velocidad, mientras que los elementos que afectan
directamente a la conducción (tracción y seguridad), así como los de
información y comunicaciones se conectan a buses de alta velocidad, al ser
más exigentes sus requisitos de tiempos de respuesta.
La siguiente figura muestra un ejemplo de aplicación de red multiplexada,
donde puede verse la ubicación y el conexionado de las distintas unidades
electrónicas entre sí. En este caso se utiliza una red CAN para la gestión del
Sincronización – Inyección Electrónica y Control Computarizado de Motor OBD II
sistema motopropulsor, que interconecta las unidades de control del sistema de
inyección 15, cambio automático 11, suspensión 2 y ABS 12. con la unidad
central BSI 17, a la que se conectan también el resto de redes multiplexadas,
que en este caso son del tipo VAN, utilizadas para los sistemas de confort y de
carrocería. En el ejemplo que nos ocupa, la red de confort agrupa los
calculadores electrónicos del cuadro de instrumentos 13, pantalla
multifunciones 9, autorradio 7, sistema de navegación 4, ayuda al
estacionamiento 10, climatización 3 y cambiador de CD 5, que se interconectan
entre sí y a la unidad central BSI 17. Para los sistemas de carrocería se
disponen dos redes VAN, conectadas también a la unidad central BSI. La
primera de ellas conecta los calculadores electrónicos de servicio del motor 16,
airbag 19 y conmutador bajo el volante 18 y, la segunda, los sistemas de
alarma 14, módulos de puertas I y 20, techo 8 y aditivación de gasolina 6.
Como es sabido, el BUS es una vía de comunicación de datos a través de uno
o dos cables eléctricos o de fibra óptica, que permite que las centrales
electrónicas dispongan únicamente de alimentación eléctrica y cableada para
Sincronización – Inyección Electrónica y Control Computarizado de Motor OBD II
los sensores y actuadores que están junto a ellas. El resto de la información
necesaria para el funcionamiento del sistema llega por el BUS, lo mismo que
estas unidades vuelcan información a la misma línea, necesaria para el
correcto funcionamiento de otros sistemas. Las unidades electrónicas disponen
un microprocesador capaz de reconocer y leer los mensajes necesarios para
su funcionamiento y, a su vez, volcar a la línea multiplexada mensajes
referentes a las señales de los sensores y estado de los actuadores ligados a
esta unidad de control. Adicionalmente se disponen protocolos sencillos para el
intercambio de datos en tiempo real, que van asociados a medios de
transmisión capaces de soportar interferencias.
El multiplexado de datos en automóviles fue introducido por primera vez hacia
el año 1.979 y. desde esta fecha, se han desarrollado muchos protocolos
dentro de la industria automovilística, como VW: A-BUS, BMW: buses I, K, P,
Ford: Bus SCP, etc. Los estándares SAE definen tres clases de buses de
comunicación de datos, denominados A, B, C y D las cuales, aunque responden
a definiciones más amplias, suelen ser empleadas para especificar las
gamas de velocidad de transmisión, cuyas equivalencias son las siguientes:
Clase A: velocidad <1 kb/s.
Clase B: 10 kb/s <velocidad< 100 kb/s.
Clase C: 100 kb/s <velocidad1Mb/s.
Varios protocolos que comenzaron diseñados por los fabricantes de
automóviles han llegado a convertirse en estándares industriales y representan
las tecnologías de multiplexado con más aceptación hoy en día por el resto de
fabricantes y con más posibilidades de aplicación futura. Dichas tecnologías
son las conocidas redes europeas CAN (originaria de Bosch) y VAN (del grupo
PSA y Renault), así como la americana SAE-J1850 en sus versiones PWM
(Chrysler y Ford) y VPWM (GM).
El éxito de los protocolos CAN reside en su simplicidad de concepción, sus
buenas características de velocidad (hasta I Mb/s) y su amplio soporte por
parte de los fabricantes de componentes electrónicos, como Motorola, Intel,
Siemens, Philips y Texas-lnstruments. Este soporte de altas velocidades de
transmisión hace que sea especialmente idóneo para aplicaciones de clase D y
se emplea fundamentalmente en Europa y por algunos fabricantes americanos.
La tecnología VAN presenta también buenas prestaciones y dispone de
protocolos muy simples de implementación en Hardware fácil y por tanto
económica. La velocidad de transmisión típica que ofrece es de 250 Kb/s,
pudiendo ser empleado en aplicaciones de Clase B y C. La tecnología SAEJ1850
es similar a las CAN y VAN pero la velocidad soportada es netamente
Sincronización – Inyección Electrónica y Control Computarizado de Motor OBD II
inferior, siendo su valor máximo de 41.6 Kb/s. lo que la hace susceptible de ser
empleada en aplicaciones de Clase A y B (velocidad baja y media).
Un análisis inicial de las propiedades de estas tecnologías concluye que las
tres son muy similares y cada una dispone de un elemento diferenciador. de
acuerdo con el cual, puede afirmarse que CAN es la que más velocidad aporta.
VAN es la más eficiente y J-1850 la más económica.
Como ya se dijo los protocolos empleados mayoritariamente son el CAN y el
VAN, aunque existen otros, el método de transmisión síncrona utiliza tramas
que permiten enviar secuencias compactas de datos. Las tramas están
compuestas de varios bloques, dependiendo del protocolo, en los que no faltan
los que indican la dirección, el mensaje en sí, la comprobación y el final.
La transmisión de datos multiplexados a través de un bus funciona un poco
como una conferencia telefónica. Un conferenciante anuncia sus propósitos en
una red de líneas mientras que los otros conferenciantes escuchan. Algunos
encuentran estas propuestas interesantes y las toman en cuenta, mientras que
otros no les dan ninguna importancia.
El proceso seguido en la transmisión de datos multiplexados sigue la secuencia
siguiente: La unidad electrónica de control emisora trata las informaciones que
le incumben, por ejemplo la presión de admisión, temperatura del aire, posición
de mariposa de gases y temperatura del refrigerante. Estas informaciones son
numeradas en paquetes de 8, 16 o 32 bits, (según la potencia del
microprocesador) para ser tratadas por el calculador. A continuación estas
informaciones son señalizadas, es decir, almacenadas bit a bit en una memoria
lampón. El multiplexor selecciona los bits unos después de otros y los envía en
serie según la cadencia de un reloj sobre una línea única.
La unidad de control receptora, que integra un desmultiplexor, recupera estos bits
que llegan unos después de otros y redefine, según el proceso inverso de
multiplexado. la codificación de la información de un captador único. Los bits
son ensamblados a medida que llegan en una memoria específica (buffer) para
ser corlados en paquetes de 8. 16 o 32 bits.
Evidentemente, todo el proceso es bidireccional, es decir que cíclicamente,
cada unidad electrónica puede ser receptora o emisora en función de las
necesidades, por lo cual, integra una etapa multiplexora y otra desmultiplexora.
Por lo que se refiere a la arquitectura de la red multiplexada, cabe diferenciar
dos necesidades: los intercambios de informaciones entre calculadores para
una gestión rápida (por ejemplo, la información del cambio automático para el
motor), y la circulación de informaciones entre componentes de mando y
Sincronización – Inyección Electrónica y Control Computarizado de Motor OBD II
potencia que no precisan un tratamiento inmediato, como la activación del
elevalunas., la climatización, el limpiaparabrisas, etc.
Para responder a estas necesidades, se disponen en el automóvil,
generalmente, varios buses o redes de comunicación, utilizándose una red de
alta velocidad para los intercambios intersistemas y una red de baja velocidad
para los intercambios de las informaciones de los componentes sin tratamiento
inmediato Los protocolos de comunicación empleados pueden ser diferentes en
estas dos redes, utilizándose generalmente el CAN para los intercambios
entre sistemas v el VAN para los buses de accesorios. Cuando se utilizan estos
dos tipos de redes, es preciso disponer una pasarela intersistemas, es decir,
una central electrónica inteligente, denominada por algunos fabricantes BSI y
por otros 131II, de un conjunto de redes
multiplexadas VAN y CAN.
Para ver mas descarga el archivo
LLANTAS USO Y MANTENIMIENTO
LLANTAS, USO Y MANTENIMIENTO<a href=»https://german7644dotcom.wordpress.com/wp-content/uploads/2012/02/foto11.jpg»>
El usar llantas correctas en su vehículo es muy importante. Las llantas
proveen la tracción y, por lo tanto, juegan un papel crucial en el frenado seguro del
vehículo. Ellas cargan el peso total del vehículo, absorben los impactos del
camino y representan el paso final en la conversión de la energía
del combustible en movimiento del vehículo. Si usted está
familiarizado con los diferentes tipos de llantas que se encuentran
disponibles, usted deberá escoger la más eficiente para ahorrar
combustible en su vehículo.
1.- LLANTAS RADIALES
Son las más avanzadas y las más populares. Las capas están dispuestas
en forma radial, esto es, paralelas las unas a las otras, en un ángulo de 90 grados
a la circunferencia de la llanta. Los cinturones de soporte son colocados sobre las
capas a lo largo de la periferia de la llanta. Estos cinturones de soporte pueden
ser fabricados de acero (como en las llantas radiales con cinturones de acero).
Las llantas radiales son la opción más común, tienen menor resistencia al
rodamiento que otros tipos de llantas y, por lo tanto, mejoran el rendimiento de
combustible, la maniobrabilidad del vehículo y el diseño de la banda de
rodamiento; debido a la construcción radial, ofrecen mejor comportamiento bajo
condiciones adversas de manejo.
2.- LLANTAS CONVENCIONALES Y LLANTAS CON CINTURÓN
Aún están disponibles. Se deben tomar precauciones para no mezclar
llantas de diferentes tipos de construcción. Debido a la gran diferencia de
comportamiento entre radiales y otros tipos de construcción, colocar dos tipos
diferentes de llantas en el mismo extremo del vehículo puede ser peligroso.
3.- LLANTAS RADIALES AHORRADORAS DE COMBUSTIBLE
Están diseñadas para ser infladas considerablemente más que las llantas
radiales comunes. Este incremento de presión hace a la llanta más dura y por lo
tanto reduce la resistencia al rodamiento y el consumo de combustible. Muchos
vehículos nuevos son equipados con este nuevo tipo de llanta (como equipo de
serie) que le ahorran combustible.
4.- LLANTAS RADIALES PARA TODA TEMPORADA.
Ofrecen lo último en tecnología en llantas. Son diseñadas para comportarse
adecuadamente bajo todas las condiciones de manejo y son generalmente del
tipo ahorradoras de combustible. Las llantas radiales para toda temporada son
una buena inversión para mucha gente, porque no es necesario cambiarlas en
invierno o en verano. Sin embargo, debido a que el diseño del piso de las llantas
radiales para toda temporada es una combinación entre un diseño para verano y
para invierno, el comportamiento bajo condiciones adversas de manejo será
ligeramente más pobre que aquellas llantas diseñadas para esas condiciones.
5.- LLANTAS PARA INVIERNO
Usan un diseño de dibujo especial y son fabricadas de hule blando. Esto
mejora la tracción en nieve o sobre hielo. Recuerde cambiar las llantas para
invierno cuando llega la primavera, ya que éstas incrementan el consumo de
combustible.
Nota: La presión en la llanta es crítica. La baja presión reduce la vida de una llanta
considerablemente, incrementa el consumo de combustible debido a la mayor
resistencia al rodamiento y puede ser peligrosa. Compre un medidor de presión y
asegúrese de revisar la presión de las llantas al menos 2 veces al mes. No olvide
verificar también la presión de la llanta de refacción.
PRESIÓN DE INFLADO
Los neumáticos son diseñados y construidos con gran cuidado para
proveer de miles de kilómetros de excelente servicio. Pero para obtener un
máximo beneficio de ellos, se debe tener un buen mantenimiento de estos
Los factores más importantes en el cuidado de estos son:
· Una adecuada presión de inflado
· Carga adecuada del vehículo
· Inspección oportuna
· Buenos hábitos de manejo
· Condiciones del vehículo
BENEFICIOS DE UN BUEN INFLADO
Con una presión adecuada, las llantas duran más, ahorran combustible y
ayudan a prevenir accidentes. La “presión adecuada” de aire es la especificada
por el fabricante del vehículo.
La presión de aire correcta se muestra en la placa de llanta (o estampa)
ubicada en un costado de la puerta, en el poste de esta, o en la tapa de la
gasolina o en la guantera. Si su vehículo no cuenta con esta placa, consulte su
manual de usuario o pregunte a su distribuidor o al fabricante de llantas.
La placa anterior muestra la carga máxima del vehículo, las presiones de
inflado en frío y el tamaño de llanta recomendado por el fabricante.
TU PROPIO MEDIDOR DE PRESIÓN
Las llantas deben estar infladas apropiadamente. Use un medidor de
presión para determinar la presión de la llanta. Uno no puede determinar si la
llanta está “baja”, o sobreinflada con la pura vista. Los medidores de presión de
aire ubicados en las gasolineras pueden ser inexactos debido a la exposición, uso
y abuso de los mismos. Lo recomendable es cargar su propio medidor para estar
seguro.
Adquiera un adecuado medidor de presión para llantas con su distribuidor,
refaccionarias, etc.
TIPS DE INFLADO
 Verifique la presión de inflado de los neumáticos (incluyendo la llanta de
Verifique la presión de inflado de los neumáticos (incluyendo la llanta de
refacción) por lo menos una vez al mes y antes de cualquier recorrido largo. Las
llantas deben de ser revisadas cuando estén frías; esto es cuando hayan recorrido
menos de 1 kilómetro. Si tienes que manejar por más de 1 Km para cargar aire,
antes de abandonar tu casa, mide la presión de inflado en frío de cada llanta y registra lo
desinflado acumulado de cada llanta.
Al llegar a la estación de servicio, vuelve a medir la presión de cada llanta,
después infla la llanta caliente hasta el nivel correspondiente de presión “en
caliente”, más lo desinflado correspondiente “en frío”.
DIBUJOS DE DESGASTE EN LLANTAS

Las llantas con zonas lisas transversales son inseguras y en algunos países
son ilegales. Cuando el dibujo es menor de 1.5 mm. reemplace las llantas
inmediatamente.

La mayoría de las llantas nuevas tienen indicadores
de uso en el piso y usted debe identificarlos en sus
llantas.

Desgaste en los «hombros» de la llanta indica baja presión de inflado. Adicione
aire, al nivel máximo recomendado por el fabricante del vehículo.
Un incorrecto cambio de la rueda significa que la alineación debe ser
revisada.


El desgaste en el centro del piso indica sobrepresión. Ajuste la presión de
la llanta a la recomendada por el fabricante.
Las huellas de desgaste (huecos) en el piso de la llanta son causadas por
un desbalanceo de la llanta o por falla en la suspensión, por lo que se le
recomienda llevar a balancear sus llantas.

Las «Plumas o escamas» en el piso de la llanta son causadas por un excesivo
Toe-in o Toe-out; por lo que la alineación de las ruedas debe ser checada.
ROTACIÓN DE LAS RUEDAS
Debido a que las llantas delanteras y traseras tienen diferentes funciones en su
vehículo, se desgastan de manera diferente, usted puede aumentar la vida de sus
llantas si las rota.

Imagen
Sabias que la mayor causa de la contaminacion del aire es la combustion del automovil?

Principalmente los combustibles fosiles los cuales son empleados especialmente en el uso industrial y automotriz. Siendo este ultimo el responsable del 70% de la comtaminacion del aire del mundo. Teoricamente, cuando ocurre combustion en un motor de gasolina, el hidrogeno y el carbono del combustible se une con el oxigeno presente en el aire para producir calor,dioxido de carbono y vapor de agua entre otros. Pero la combustion no se realiza totalmente completa dentro de un motor. aclarando ademas que una incorrecta relacion de la mezcla aire combustible, temperatruras muy levadas o muy bajas, piezas desgastadas y un descuidado mantenimiento del parque automotor son lcausas adicionales que disparan mas el porcentaje de contaminacion atmosferica, la mayor formacion de hidrocarburos no quemados, monoxido de carbono,oxido de azufre y oxido de nitrogeno que producen una contaminacion que va en un alarmante aumento alcanzando niveles peligrosos para la salud humana.
Los niveles cada día más altos de gases de efecto de invernadero en la atmósfera terrestre causarán en los próximos años el incremento de la temperatura promedio de la Tierra. Los gases de invernadero como el CO2 y otros, que se detallarán más adelante, producen una capa de gases alrededor de la Tierra que evita que parte de los rayos solares que llegan al planeta reboten nuevamente hacia fuera, quedándose atrapados en el interior de dicha capa .
Los gases de invernadero como el CO2 y otros, producen una capa de gases alrededor de la Tierra que evita que parte de los rayos solares que llegan al planeta reboten nuevamente hacia fuera, quedándose atrapados en el interior de dicha capa .Consecuencias del Cambio Climático
En los últimos años se han venido presentando trastornos en el comportamiento de las condiciones atmosféricas y el clima, como huracanes y tormentas anormales. Los recientes veranos en Europa y Estados Unidos han sido lo más fuertes en los últimos 200 años.
Modelaciones y algoritmos computacionales provenientes del IPCC (Panel Intergubernamental de la Convención del Cambio Climático de las Naciones Unidas), prevén derretimiento parcial de los glaciales de los polos, con el consecuente incremento del nivel del mar que afectará severamente los países costeros. También prevén incremento en la temperatura promedio de la Tierra con efectos impredecibles para los ecosistemas. Está en juego la calidad de vida de nuestras generaciones futuras, hijos, nietos, etc. Los hombres y las mujeres de hoy tenemos el deber de preservar la calidad de vida para las generaciones futuras, que a su vez tienen el derecho inalienable de disponer de un ambiente sano…….
El medio ambiente. Un asunto de interes para la seguridad Mundial

Es hora de comprender que el medio ambiente es en realidad,uno de los problemas de MAYOR importancia en la seguridad de la humanidad para el siglo 21. Pues el impacto politico y estrategico,ante el aumento vertiginoso de la poblacion mundial, la propagacion de nuevas enfermedades, la descontrlada y permanente deforestacion y erosion de los suelos, el agotamiento de los recursos hidricos, lacontgaminacion de las aguas y el AIRE.
Es la gran amenaza para el medio ambiente,siendo este un fenomeno que nos afecta a todos. no obstante,es algo ‘no tradicional ni de mayor importancia para el GRAN PUBLICO quien NO COMPRENDE TODAVIA SUS DIMENSIONES A NIVEL MUNDIAL
Imagen
SENSOR DE LLUVIA
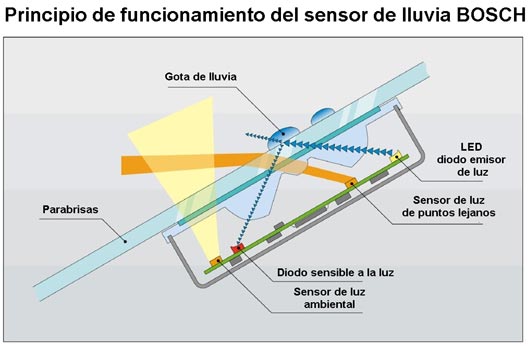
Funcionamiento del sensor de lluvia
El limpiaparabrisas es uno de esos elementos que ha ido mejorando poco a poco, siempre con el mismo principio de funcionamiento: el canto de una tira de goma de sección rectangular presiona el cristal y desplaza el agua. Ha mejorado con la posibilidad de barrer a diferentes velocidades, de tener un intermitencia fija o —posteriormente— variable. Pero, en cualquier caso, ajustar la frecuencia era tarea del conductor. Esto ha dejado de ser así con el limpiaparabrisas automático.
El elemento principal del limpiaparabrisas automático es el sensor de lluvia, un dispositivo basado en un principio físico llamado refracción y reflexión de la luz. Cuando un rayo de luz cambia el medio que está atravesando, pueden pasar tres cosas: que lo atraviese sin cambiar de dirección, que lo atraviese y cambie de dirección, o que se refleje como si hubiese incidido en un espejo. La primera situación sólo se da cuando el rayo incide perpendicularmente. La segunda, si cambia ligeramente la dirección, se denomina refracción y ocurre cuando el ángulo es inferior a los 90º. La tercera —reflexión— ocurre cuando el ángulo de incidencia tiene determinado valor, que suele depender del medio.
El sensor de lluvia se compone de un diodo que emite luz con un determinado ángulo, de tal forma que incide sobre la superfice exterior del cristal y se reflejan. Si el agua de la lluvia se queda sobre el cristal, las características de la superficie de reflexión varían, debido a que aumenta el grosor aparente del cristal, y por tanto solo una parte del haz de luz es reflejado.
El haz de luz reflejado se recoge en un diodo sensible a la luz. En función de la luz recibida dejará pasar más o menos corriente. De esa manera, gracias a un microchip, estima cuanta agua hay en la zona estudiada. A menor reflexión, mayor cantidad de agua, que por supuesto, es una muestra representativa de todo el parabrisas. En función del agua detectada, hará funcionar el limpiaparabrisas con mayor o menor rapidez, e incluso cerrar las ventanillas y el techo solar (el Citroën C5 por ejemplo lo hace) si está programado para eso. También puede ralentizar e incluso detener el parabrisas si el coche queda parado.
El sistema lleva además sensores para detectar la luz ambiental, y de esa manera adecuar tanto la velocidad de los limpiaparabrisas (por la noche hace falta que vayan más rápido para la misma cantidad de agua), como para poder distinguir zonas puntuales de sombra, de túneles y anocheceres donde se hace necesario encender las luces.
Contaminacion vehicular
 El presente articulo explica los fundamentos basicos del analisis de gases de escape de
El presente articulo explica los fundamentos basicos del analisis de gases de escape de
un motor de combustion interna.
Del resultado del proceso de combustion del motor se obtienen diversos gases y
productos, entre ellos los mas importantes son el CO ( monoxido de carbono ), el CO2
( dioxido de carbono ), el O2 ( Oxigeno ) , Hidrocarburos no quemados ( HC ),
Nitrogeno , Agua y bajo ciertas condiciones Nox ( oxidos de Nitrogeno).
Un correcto analisis de las proporciones de los gases puede dar lugar a diagnosticos
muy importantes del funcionamiento del motor.
El analizador de gases de escape analiza la quimica de estos gases y nos dice en que
proprorciones se encuentran los mismos.
Todos estos productos se obtienen a partir del aire y del combustible que ingresa al
motor, el aire tiene un 80 % de Nitrogeno y un 20 % de Oxigeno ( aproximadamente ).

ver en facebook
FRENOS CERAMICOS
 Frenos cerámicos, más rozamiento y duración .Para comprender el porqué de los frenos cerámicos por ahora inaccesibles para los coches de utilización normal, deberemos saber algo sobre las leyes de rozamiento entre cuerpos sólidos.
Frenos cerámicos, más rozamiento y duración .Para comprender el porqué de los frenos cerámicos por ahora inaccesibles para los coches de utilización normal, deberemos saber algo sobre las leyes de rozamiento entre cuerpos sólidos.

Consideremos la fig.1 : Si intentamos que los dos bloques de ladrillos se deslicen por la superficie de la mesa mediante la fuerza que ejerce el peso P, nos puede sorprender que el rozamiento entre dicho bloque y la mesa no depende nada más que de la fuerza normal a la superficie que esté ejerciendo aquél sobre ésta. La fuerza producida por el peso P, mueve igual el bloque de la izquierda que el de la derecha, aunque éste presenta una superficie 3 veces mayor. Ésta es la llamada en la mecánica clásica «primera ley del rozamiento»:


fig.1
La fuerza de rozamiento no depende de la magnitud de las superficies en contacto.
¿De qué depende entonces? solamente del llamado coeficiente de rozamiento —denominado con la letra griega µ (mu)— y de la fuerza normal que se ejerza entre las dos superficies (fuerza normal es el peso en el caso de los bloques de ladrillos).
Fr = µ • N
N, es la resultante en sentido vertical de las fuerzas que actúan sobre el o los bloques; en el caso de no haber otra que el peso, éste será la fuerza normal.
El coeficiente de rozamiento toma valores muy diferentes dependiendo de la rugosidad de las superficies en contacto y de la naturaleza de ellas.
A continuación presentamos una tabla que nos puede servir de ejemplo en la que están reflejados diferentes valores de µ
µ = 0.9 … … … … … … … Alquitrán seco
µ = 0.8 … … … … … … … Asfalto rugoso seco
µ = 0.6 … … … … … … … Adoquinado
µ = 0.5 … … … … … … … Asfalto rugoso húmedo
µ = 0.4 … … … … … … … Asfalto usado húmedo
µ = 0.3 … … … … … … … Pastilla de freno sobre disco de fundición
µ = 0.3 … … … … … … … Adoquinado húmedo
µ = 0.1 … … … … … … … Hielo
Al observar la fig.2 se puede ver que, si para hacer deslizar el bloque de la izquierda, tenemos que ejercer la fuerza F ( ya que la de rozamiento Fr está oponiéndose a nuestro empuje ), para mover el siguiente, que pesa 10 veces mas, deberemos ejercer una fuerza F= 10 F (10 veces superior ) puesto que la de rozamiento Fr es así mismo 10 veces superior.

fig.2
Si derramamos aceite entre las dos superficies, la fuerza a efectuar se reduce drásticamente a pesar de que el bloque sea tan pesado. Como podemos deducir de lo anterior, el rozamiento entre dos superficies sólidas, solo depende de la naturaleza de las superficies en contacto; es decir, del coeficiente de rozamiento, y de la Resultante de las fuerzas que estén actuando Normales (perpendiculares) a la superficie; es decir. el peso del sólido, o el peso más la resultante de una o varias fuerzas perpendiculares a la superficie que en general puedan actuar; esto independientemente de la dimensión de dicha superficie de contacto con el suelo. Es así en el caso de cuerpos tan poco deformables como un ladrillo, pero no en el caso del neumático de un coche.
La fig.3, nos muestra cómo evoluciona idealmente el coeficiente de fuerza de freno con respecto al deslizamiento del neumático con el suelo.

fig.3
lk es el máximo valor de fuerza de freno, antes de que el neumático deslice claramente hasta llegar a la pérdida total de la adherencia (100% de deslizamiento). El punto lk es donde los fabricantes de los sistemas antibloqueo de frenos hacen que comience su secuencia de funcionamiento.
 El coeficiente de rozamiento en frío de una pastilla cuyo material está pensado para una utilización normal, es de un valor relativamente alto (µ = 0.34) en comparación a su valor al pasar los 400º (µ = 0.25). El pensado para una utilización deportiva, presenta valores contrarios a los anteriores, es decir en las primeras frenadas hasta que se alcanzan 200º puede ser µ = 0.2, para pasar a un valor de µ = 0.3 en caliente (400º) manteniéndose en este valor hasta los 650º en que baja de nuevo a µ = 0.2. Con una pastilla de estas características, en el momento de aplicar el freno en frío, el conductor se encuentra con la sensación de que falta el agarre deseado. Sólo después de unas cuantas frenadas, en las que el disco alcanza más de 200º, es estable hasta que sobrevenga el calentamiento excesivo (fading) por encima de 650º, lo que produce una bajada drástica del coeficiente de rozamiento.
El coeficiente de rozamiento en frío de una pastilla cuyo material está pensado para una utilización normal, es de un valor relativamente alto (µ = 0.34) en comparación a su valor al pasar los 400º (µ = 0.25). El pensado para una utilización deportiva, presenta valores contrarios a los anteriores, es decir en las primeras frenadas hasta que se alcanzan 200º puede ser µ = 0.2, para pasar a un valor de µ = 0.3 en caliente (400º) manteniéndose en este valor hasta los 650º en que baja de nuevo a µ = 0.2. Con una pastilla de estas características, en el momento de aplicar el freno en frío, el conductor se encuentra con la sensación de que falta el agarre deseado. Sólo después de unas cuantas frenadas, en las que el disco alcanza más de 200º, es estable hasta que sobrevenga el calentamiento excesivo (fading) por encima de 650º, lo que produce una bajada drástica del coeficiente de rozamiento.
 En 1.977, Porsche trasladó a la fabricación en serie la técnica de la competición; concretamente, extrajo los discos autoventilados del famoso 917 de carreras; estos discos, cuya sección se muestra en la siguiente fig., están constituidos por un canal central con unas nervaduras centrales envolventes en forma de turbina, que crean una corriente de aire del interior del disco hacia la periferia; que con su efecto disipador del calor, los refrigera sustancialmente.
En 1.977, Porsche trasladó a la fabricación en serie la técnica de la competición; concretamente, extrajo los discos autoventilados del famoso 917 de carreras; estos discos, cuya sección se muestra en la siguiente fig., están constituidos por un canal central con unas nervaduras centrales envolventes en forma de turbina, que crean una corriente de aire del interior del disco hacia la periferia; que con su efecto disipador del calor, los refrigera sustancialmente.
Con estos discos, la estabilidad de la frenada en caliente, mejoró en una gran medida, consiguiéndose en el 911 Turbo ( primer coche donde se montó) distancias de frenada y estabilidad de la misma, semejantes a los coches de competición de la época.
La evolución de la técnica desde entonces, ha hecho que en su continua búsqueda de la máxima calidad para sus productos, Porsche saque al mercado y ofrezca como opción unos discos que aportan unas ventajas innegables a los anteriores; se trata de unos discos fabricados con fibra de carbono con lo que ello supone de ligereza y robustez.
La ventilación está asegurada por unos conductos interiores, que han sido patentados por la propia marca, y que junto a los taladros transversales refuerzan el efecto de ventilación en la superficie. A esta estructura en fibra de carbono se añade una capa superficial de material cerámico (básicamente carburo de silicio). Esta capa se adhiere mediante un sofisticado proceso de cocción a 1.420 º en un horno de alto vacío, y bajo una atmósfera de nitrógeno. A esta temperatura muy exactamente mantenida la cerámica fluye en fase líquida impregnando la fibra de carbono, que la absorbe como si de una esponja se tratara.
 Tras el proceso de enfriamiento, el disco de freno tiene la dureza del diamante ( 9,7 R) presentando una gran resistencia a la abrasión, lo que alarga extremadamente su vida útil (300.000 kms ). Su coeficiente de rozamiento también es mayor que el de un disco de fundición.
Tras el proceso de enfriamiento, el disco de freno tiene la dureza del diamante ( 9,7 R) presentando una gran resistencia a la abrasión, lo que alarga extremadamente su vida útil (300.000 kms ). Su coeficiente de rozamiento también es mayor que el de un disco de fundición.
Las pastillas de freno también permiten realizar un kilometraje que se puede cifrar en el doble de lo habitual. Esta altísima dureza superficial, hace que se mantenga su forma plana incluso por encima de 650º. Es decir, es casi imposible que se alabee , un fenómeno se que produce en los discos normales, y provoca una mala adaptación de la pastilla al disco.
La desventaja de este tipo de frenos es su precio. Por ahora es una opción en el Turbo, que cuesta 1.500.000 ptas. Pero estoy seguro de que en un futuro próximo los veremos como equipo original en coches de más modestas prestaciones.



Como funciona el sistema GPS,
![]()
En cinco pasos lógicos
- Triangulación. La base del GPS es la «triangulación» desde los satélites
- Distancias. Para «triangular», el receptor de GPS mide distancias utilizando el tiempo de viaje de señales de radio.
- Tiempo. Para medir el tiempo de viaje de estas señales, el GPS necesita un control muy estricto del tiempo y lo logra con ciertos trucos.
- Posición. Además de la distancia, el GPS necesita conocer exactamente donde se encuentran los satélites en el espacio. Orbitas de mucha altura y cuidadoso monitoreo, le permiten hacerlo.
- Corrección. Finalmente el GPS debe corregir cualquier demora en el tiempo de viaje de la señal que esta pueda sufrir mientras atraviesa la atmósfera.
Veamos cada uno de estos puntos en detalle.
Paso 1: La Triangulación desde los satélites
Aunque pueda parecer improbable, la idea general detrás del GPS es utilizar los satélites en el espacio como puntos de referencia para ubicaciones aquí en la tierra.
Esto se logra mediante una muy, pero muy exacta, medición de nuestra distancia hacia al menos tres satélites, lo que nos permite «triangular» nuestra posición en cualquier parte de la tierra.
Olvidémonos por un instante sobre cómo mide nuestro GPS dicha distancia. Lo veremos luego. Consideremos primero como la medición de esas distancias nos permiten ubicarnos en cualquier punto de la tierra.
La gran idea, Geométricamente, es:
Supongamos que medimos nuestra distancia al primer satélite y resulta ser de 11.000 millas (20.000 Km)
Sabiendo que estamos a 11.000 millas de un satélite determinado, no podemos por lo tanto estar en cualquier punto del universo sino que esto limita nuestra posición a la superficie de una esfera que tiene como centro dicho satélite y cuyo radio es de 11.000 millas.
A continuación medimos nuestra distancia a un segundo satélite y descubrimos que estamos a 12.000 millas del mismo.
Esto nos dice que no estamos solamente en la primer esfera, correspondiente al primer satélite, sino también sobre otra esfera que se encuentra a 12.000 millas del segundo satélite. En otras palabras, estamos en algún lugar de la circunferencia que resulta de la intersección de las dos esferas.
Si ahora medimos nuestra distancia a un tercer satélite y descubrimos que estamos a 13.000 millas del mismo, esto limita nuestra posición aún mas, a los dos puntos en los cuales la esfera de 13.000 millas corta la circunferencia que resulta de la intersección de las dos primeras esferas.
O sea, que midiendo nuestra distancia a tres satélites limitamos nuestro posicionamiento a solo dos puntos posibles.
Para decidir cual de ellos es nuestra posición verdadera, podríamos efectuar una nueva medición a un cuarto satélite. Pero normalmente uno de los dos puntos posibles resulta ser muy improbable por su ubicación demasiado lejana de la superficie terrestre y puede ser descartado sin necesidad de mediciones posteriores.
Una cuarta medición, de todos modos es muy conveniente por otra razón que veremos mas adelante.
Veamos ahora como el sistema mide las distancias a los satélites.
En Resumen: Triangulación
- Nuestra posición se calcula en base a la medición de las distancias a los satélites
- Matemáticamente se necesitan cuatro mediciones de distancia a los satélites para determinar la posición exacta
- En la práctica se resuelve nuestra posición con solo tres mediciones si podemos descartar respuestas ridículas o utilizamos ciertos trucos.
- Se requiere de todos modos una cuarta medición por razones técnicas que luego veremos.
Paso 2: Midiendo las distancias a los satélites
Sabemos ahora que nuestra posición se calcula a partir de la medición de la distancia hasta por lo menos tres satélites. Pero, ¿cómo podemos medir la distancia hacia algo que está flotando en algún lugar en el espacio?. Lo hacemos midiendo el tiempo que tarda una señal emitida por el satélite en llegar hasta nuestro receptor de GPS.
La gran idea, Matemáticamente, es:
Toda la idea bulle alrededor de aquellos problemas sobre la velocidad que resolvíamos en la secundaria, Recordemos que «Si un coche circula a 60 kilómetros por hora durante dos horas, ¿qué distancia recorrió?
Velocidad (60 km/h) x Tiempo (2 horas) = Distancia (120 km)
En el caso del GPS estamos midiendo una señal de radio, que sabemos que viaja a la velocidad de la luz, alrededor de 300.000 km por segundo.
Nos queda el problema de medir el tiempo de viaje de la señal (Que, obviamente, viene muy rápido)
Sincronicemos nuestros relojes
El problema de la medición de ese tiempo es complicado. Los tiempos son extremadamente cortos. Si el satélite estuviera justo sobre nuestras cabezas, a unos 20.000 km de altura, el tiempo total de viaje de la señal hacia nosotros sería de algo mas de 0.06 segundos. Estamos necesitando relojes muy precisos. Ya veremos como lo resolvemos.
Pero, aún admitiendo que tenemos relojes con la suficiente precisión, ¿cómo medimos el tiempo de viaje de la señal?
Supongamos que nuestro GPS, por un lado, y el satélite, por otro, generan una señal auditiva en el mismo instante exacto. Supongamos también que nosotros, parados al lado de nuestro receptor de GPS, podamos oír ambas señales (Obviamente es imposible «oír» esas señales porque el sonido no se propaga en el vacío).
Oiríamos dos versiones de la señal. Una de ellas inmediatamente, la generada por nuestro receptor GPS y la otra con cierto atraso, la proveniente del satélite, porque tuvo que recorrer alrededor de 20.000 km para llegar hasta nosotros. Podemos decir que ambas señales no están sincronizadas.
Si quisiéramos saber cual es la magnitud de la demora de la señal proveniente del satélite podemos retardar la emisión de la señal de nuestro GPS hasta lograr la perfecta sincronización con la señal que viene del satélite.
El tiempo de retardo necesario para sincronizar ambas señales es igual al tiempo de viaje de la señal proveniente del satélite. Supongamos que sea de 0.06 segundos. Conociendo este tiempo, lo multiplicamos por la velocidad de la luz y ya obtenemos la distancia hasta el satélite.
Tiempo de retardo (0.06 seg) x Vel. de la luz (300.000 km/seg) = Dist. (18.000 km)
Así es, básicamente, como funciona el GPS.
La señal emitida por nuestro GPS y por el satélite es algo llamado «Código Pseudo Aleatorio» (Pseudo Random Code). La palabra «Aleatorio» significa algo generado por el azar.
¿Un Código Aleatorio?
Este Código Pseudo Aleatorio es una parte fundamental del GPS. Físicamente solo se trata de una secuencia o código digital muy complicado. O sea una señal que contiene una sucesión muy complicada de pulsos «on» y «off», como se pueden ver:
La señal es tan complicada que casi parece un ruido eléctrico generado por el azar. De allí su denominación de «Pseudo-Aleatorio».
Hay varias y muy buenas razones para tal complejidad. La complejidad del código ayuda a asegurarnos que el receptor de GPS no se sintonice accidentalmente con alguna otra señal. Siendo el modelo tan complejo es altamente improbable que una señal cualquiera pueda tener exactamente la misma secuencia.
Dado que cada uno de los satélites tiene su propio y único Código Pseudo Aleatorio, esta complejidad también garantiza que el receptor no se confunda accidentalmente de satélite. De esa manera, también es posible que todos los satélites trasmitan en la misma frecuencia sin interferirse mutuamente. Esto también complica a cualquiera que intente interferir el sistema desde el exterior al mismo. El Código Pseudo Aleatorio le da la posibilidad al Departamento de Defensa de EEUU de controlar el acceso al sistema GPS.
Pero hay otra razón para la complejidad del Código Pseudo Aleatorio, una razón que es crucial para conseguir un sistema GPS económico.
El código permite el uso de la «teoría de la información» para amplificar las señales de GPS. Por esa razón las débiles señales emitidas por los satélites pueden ser captadas por los receptores de GPS sin el uso de grandes antenas.
Cuando comenzamos a explicar el mecanismo de emisión de las señales por el GPS y el satélite, asumimos que ambos comenzaban la emisión de la señal exactamente al mismo tiempo. ¿Pero cómo podemos asegurarnos que todo esté perfectamente sincronizado?
Ya veremos…
En Resumen: Midiendo la distancia
- La distancia al satélite se determina midiendo el tiempo que tarda una señal de radio, emitida por el mismo, en alcanzar nuestro receptor de GPS.
- Para efectuar dicha medición asumimos que ambos, nuestro receptor GPS y el satélite, están generando el mismo Código Pseudo Aleatorio en exactamente el mismo momento.
- Comparando cuanto retardo existe entre la llegada del Código Pseudo Aleatorio proveniente del satélite y la generación del código de nuestro receptor de GPS, podemos determinar cuanto tiempo le llevó a dicha señal llegar hasta nosotros.
- Multiplicamos dicho tiempo de viaje por la velocidad de la luz y obtenemos la distancia al satélite.
Paso 3: Control perfecto del tiempo
Si la medición del tiempo de viaje de una señal de radio es clave para el GPS, los relojes que empleamos deben ser exactísimos, dado que si miden con un desvío de un milésimo de segundo, a la velocidad de la luz, ello se traduce en un error de 300 km!
Por el lado de los satélites, el timing es casi perfecto porque llevan a bordo relojes atómicos de increíble precisión.
¿Pero que pasa con nuestros receptores GPS, aquí en la tierra?
Recordemos que ambos, el satélite y el receptor GPS, deben ser capaces de sincronizar sus Códigos Pseudo Aleatorios para que el sistema funcione.
Si nuestros receptores GPS tuvieran que alojar relojes atómicos (Cuyo costo está por encima de los 50 a 100.000 U$S) la tecnología resultaría demasiado costosa y nadie podría acceder a ellos.
Por suerte los diseñadores del sistema GPS encontraron una brillante solución que nos permite resolver el problema con relojes mucho menos precisos en nuestros GPS. Esta solución es uno de los elementos clave del sistema GPS y, como beneficio adicional, significa que cada receptor de GPS es en esencia un reloj atómico por su precisión.
El secreto para obtener un timing tan perfecto es efectuar una medición satelital adicional.
Resulta que si tres mediciones perfectas pueden posicionar un punto en un espacio tridimensional, cuatro mediciones imperfectas pueden lograr lo mismo.
Esta idea es fundamental para el funcionamiento del sistema GPS, pero su explicación detallada excede los alcances de la presente exposición. De todos modos, aquí va un resumen somero:
Una medición adicional remedia el desfasaje del timing.
Si todo fuera perfecto (es decir que los relojes de nuestros receptores GPS lo fueran), entonces todos los rangos (distancias) a los satélites se intersectarían en un único punto (que indica nuestra posición). Pero con relojes imperfectos, una cuarta medición, efectuada como control cruzado, NO intersectará con los tres primeros.
De esa manera la computadora de nuestro GPS detectará la discrepancia y atribuirá la diferencia a una sincronización imperfecta con la hora universal.
Dado que cualquier discrepancia con la hora universal afectará a las cuatro mediciones, el receptor buscará un factor de corrección único que siendo aplicado a sus mediciones de tiempo hará que los rangos coincidan en un solo punto.
Dicha corrección permitirá al reloj del receptor ajustarse nuevamente a la hora universal y de esa manera tenemos un reloj atómico en la palma de nuestra mano!
Una vez que el receptor de GPS aplica dicha corrección al resto de sus mediciones, obtenemos un posicionamiento preciso.
Una consecuencia de este principio es que cualquier GPS decente debe ser capaz de sintonizar al menos cuatro satélites de manera simultánea. En la práctica, casi todos los GPS en venta actualmente, acceden a mas de 6, y hasta a 12, satélites simultáneamente.
Ahora bien, con el Código Pseudo Aleatorio como un pulso confiable para asegurar la medición correcta del tiempo de la señal y la medición adicional como elemento de sincronización con la hora universal, tenemos todo lo necesario para medir nuestra distancia a un satélite en el espacio.
Pero, para que la triangulación funcione necesitamos conocer no sólo la distancia sino que debemos conocer dónde están los satélites con toda exactitud.
Veremos cómo lo conseguimos.
En Resumen: Obtener un Timing Perfecto
- Un timing muy preciso es clave para medir la distancia a los satélites
- Los satélites son exactos porque llevan un reloj atómico a bordo.
- Los relojes de los receptores GPS no necesitan ser tan exactos porque la medición de un rango a un satélite adicional permite corregir los errores de medición.
Paso 4: Conocer dónde están los satélites en el espacio
A lo largo de este trabajo hemos estado asumiendo que conocemos dónde están los satélites en sus órbitas y de esa manera podemos utilizarlos como puntos de referencia.
¿Pero, cómo podemos saber donde están exactamente? Todos ellos están flotando a unos 20.000 km de altura en el espacio.
Un satélite a gran altura se mantiene estable
La altura de 20.000 km es en realidad un gran beneficio para este caso, porque algo que está a esa altura está bien despejado de la atmósfera. Eso significa que orbitará de manera regular y predecible mediante ecuaciones matemáticas sencillas.
La Fuerza Aérea de los EEUU colocó cada satélite de GPS en una órbita muy precisa, de acuerdo al Plan Maestro de GPS.
En tierra, todos los receptores de GPS tienen un almanaque programado en sus computadoras que les informan donde está cada satélite en el espacio, en cada momento.
El Control Constante agrega precisión
Las órbitas básicas son muy exactas pero con el fin de mantenerlas así, los satélites de GPS son monitoreados de manera constante por el Departamento de Defensa.
Ellos utilizan radares muy precisos para controlar constantemente la exacta altura, posición y velocidad de cada satélite.
Los errores que ellos controlan son los llamados errores de efemérides, o sea evolución orbital de los satélites. Estos errores se generan por influencias gravitacionales del sol y de la luna y por la presión de la radiación solar sobre los satélites.
Estos errores son generalmente muy sutiles pero si queremos una gran exactitud debemos tenerlos en cuenta.
Corrigiendo el mensaje
Una vez que el Departamento de Defensa ha medido la posición exacta de un satélite, vuelven a enviar dicha información al propio satélite. De esa manera el satélite incluye su nueva posición corregida en la información que transmite a través de sus señales a los GPS.
Esto significa que la señal que recibe un receptor de GPS no es solamente un Código Pseudo Aleatorio con fines de timing. También contiene un mensaje de navegación con información sobre la órbita exacta del satélite
Con un timing perfecto y la posición exacta del satélite podríamos pensar que estamos en condiciones de efectuar cálculos perfectos de posicionamiento. Sin embargo debemos resolver otros problemas.
En Resumen: Posicionamiento de los Satélites
- Para utilizar los satélites como puntos de referencia debemos conocer exactamente donde están en cada momento.
- Los satélites de GPS se ubican a tal altura que sus órbitas son muy predecibles.
- El Departamento de Defensa controla y mide variaciones menores en sus órbitas.
- La información sobre errores es enviada a los satélites para que estos a su vez retransmitan su posición corregida junto con sus señales de timing.
Paso 5: Corrigiendo Errores
Hasta ahora hemos estado tratando los cálculos del sistema GPS de manera muy abstracta, como si todo el proceso ocurriera en el vacío. Pero en el mundo real hay muchas cosas que le pueden suceder a una señal de GPS para transformarla en algo menos que matemáticamente perfecta.
Para aprovechar al máximo las ventajas del sistema un buen receptor de GPS debe tener en cuenta una amplia variedad de errores posibles. Veamos que es lo que debemos enfrentar.
Un Rudo Viaje a través de la atmósfera
En primer lugar, una de las presunciones básicas que hemos estado usando a lo largo de este trabajo no es exactamente cierta. Hemos estado afirmando que podemos calcular la distancia a un satélite multiplicando el tiempo de viaje de su señal por la velocidad de la luz. Pero la velocidad de la luz sólo es constante en el vacío.
Una señal de GPS pasa a través de partículas cargadas en su paso por la ionosfera y luego al pasar a través de vapor de agua n la troposfera pierde algo de velocidad, creando el mismo efecto que un error de precisión en los relojes.
Hay un par de maneras de minimizar este tipo de error. Por un lado, podríamos predecir cual sería el error tipo de un día promedio. A esto se lo llama modelación y nos puede ayudar pero, por supuesto, las condiciones atmosféricas raramente se ajustan exactamente el promedio previsto.
Otra manera de manejar los errores inducidos por la atmósfera es comparar la velocidad relativa de dos señales diferentes. Esta medición de doble frecuencia es muy sofisticada y solo es posible en receptores GPS muy avanzados.
Un Rudo Viaje sobre la tierra
Los problemas para la señal de GPS no terminan cuando llega a la tierra. La señal puede rebotar varias veces debido a obstrucciones locales antes de ser captada por nuestro receptor GPS.
Este error es similar al de las señales fantasma que podemos ver en la recepción de televisión. Los buenos receptores GPS utilizan sofisticados sistemas de rechazo para minimizar este problema.
Problemas en el satélite
Aún siendo los satélites muy sofisticados no tienen en cuenta minúsculos errores en el sistema.
Los relojes atómicos que utilizan son muy, pero muy, precisos, pero no son perfectos. Pueden ocurrir minúsculas discrepancias que se transforman en errores de medición del tiempo de viaje de las señales.
Y, aunque la posición de los satélites es controlada permanentemente, tampoco pueden ser controlados a cada segundo. De esa manera pequeñas variaciones de posición o de efemérides pueden ocurrir entre los tiempos de monitoreo.
Algunos ángulos son mejores que otros
La geometría básica por si misma puede magnificar estos errores mediante un principio denominado «Dilación Geométrica de la Precisión», o DGDP
Suena complicado pero el principio es simple.
En la realidad suele haber mas satélites disponibles que los que el receptor GPS necesita para fijar una posición, de manera que el receptor toma algunos e ignora al resto.
Si el receptor toma satélites que están muy juntos en el cielo, las circunferencias de intersección que definen la posición se cruzarán a ángulos con muy escasa diferencia entre sí. Esto incrementa el área gris o margen de error acerca de una posición.
Si el receptor toma satélites que están ampliamente separados, las circunferencias intersectan a ángulos prácticamente rectos y ello minimiza el margen de error.
Los buenos receptores son capaces de determinar cuales son los satélites que dan el menor error por Dilución Geométrica de la Precisión.
¡Errores Intencionales!
Aunque resulte difícil de creer, el mismo Gobierno que pudo gastar 12.000 Millones de dólares para desarrollar el sistema de navegación más exacto del mundo, está degradando intencionalmente su exactitud. Dicha política se denomina «Disponibilidad Selectiva» y pretende asegurar que ninguna fuerza hostil o grupo terrorista pueda utilizar el GPS para fabricar armas certeras.
Básicamente, el Departamento de Defensa introduce cierto «ruido» en los datos del reloj satelital, lo que a su vez se traduce en errores en los cálculos de posición. El Departamento de Defensa también puede enviar datos orbitales ligeramente erróneos a los satélites que estos reenvían a los receptores GPS como parte de la señal que emiten.
Estos errores en su conjunto son la mayor fuente unitaria de error del sistema GPS. Los receptores de uso militar utilizan una clave encriptada para eliminar la Disponibilidad Selectiva y son, por ello, mucho más exactos.
La línea final
Afortunadamente todos esos errores no suman demasiado error total. Existe una forma de GPS, denominada GPS Diferencial, que reduce significativamente estos problemas.
En Resumen: Corrección de Errores
- La ionosfera y la troposfera causan demoras en la señal de GPS que se traducen en errores de posicionamiento.
- Algunos errores se pueden corregir mediante modelación y correcciones matemáticas.
- La configuración de los satélites en el cielo puede magnificar otros errores
- El GPS Diferencial puede eliminar casi todos los errores
Resumen de las fuentes de error del sistema GPS
Errores típicos, en Metros (Por cada satélite)
|
Fuentes de Error |
GPS Standard |
GPS Diferencial |
|
Reloj del Satélite |
1.5 |
0 |
|
Errores Orbitales |
2.5 |
0 |
|
Ionosfera |
5.0 |
0.4 |
|
Troposfera |
0.5 |
0.2 |
|
Ruido en el Receptor |
0.3 |
0.3 |
|
Señal Fantasma |
0.6 |
0.6 |
|
Disponibilidad Selectiva |
30 |
0 |
|
Exactitud Promedio de Posición |
||
|
Horizontal |
50 |
1.3 |
|
Vertical |
78 |
2.0 |
|
3-D |
93 |
2.8 |









")



